Sumo Bot Project
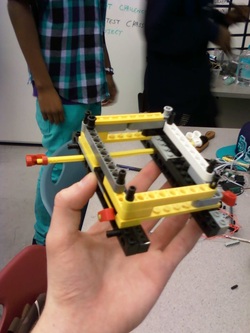
This is our first leggo chassis
Real Sumobot
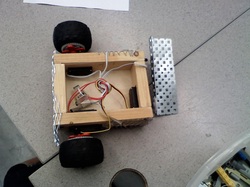
This is the top view of our actual, final sumobot without the CBC. This project is about who can build a working robot with the resources we choose. Then we compete against all the other robots in a competition. Although the realproject, deep down, is about teamwork. It is about getting instructions and dividing it up equally throughout the team and put in our parts so that we can come up with a complete and working robot.
Search Stragedy
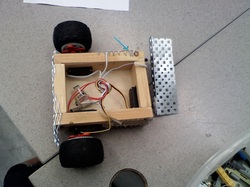
We are using an infared sensor to make sure that our robot does not fall off the edge of the tournament ring. This infared sensor is a short sensor so it can sense the ground underneath it, so once it no longe sees the ground, it stops and then turns around. As you can see, the blue arrow is pointing to where we have the infared sensor located, which is on the north left side of the robot facing down.
Attack Strategy
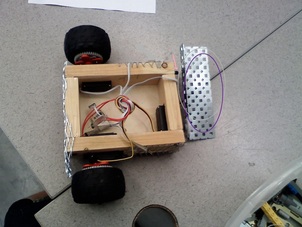
For our attack strategy we are using a touch sensor which is pointed at in coral. We are using a touch sensor, so basically when the metal lift, in the purple oval, hits the sensor-it will do so when it either scoops up another robot or another robot drives onto the lift-it will move up and hopefully flip or move the opposing bot(s).
Defense Strategy
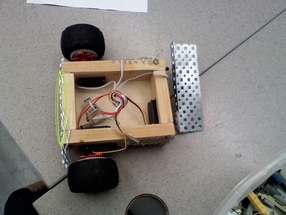
For our defense strategy we are using the lift(purple oval above) to push away other opponents. To mkae sure no one flips us over or what not in the rear of the robot, we placed chicken wire on the back and have it from the top of the robot to touching the table, the chicken wire is seen in the thin, yellow-green oval.
